哈工大惊艳亮相中国研究生机器人创新设计大赛
这些机器人挺神 仿猫跳跃 极地“扬帆滑橇”
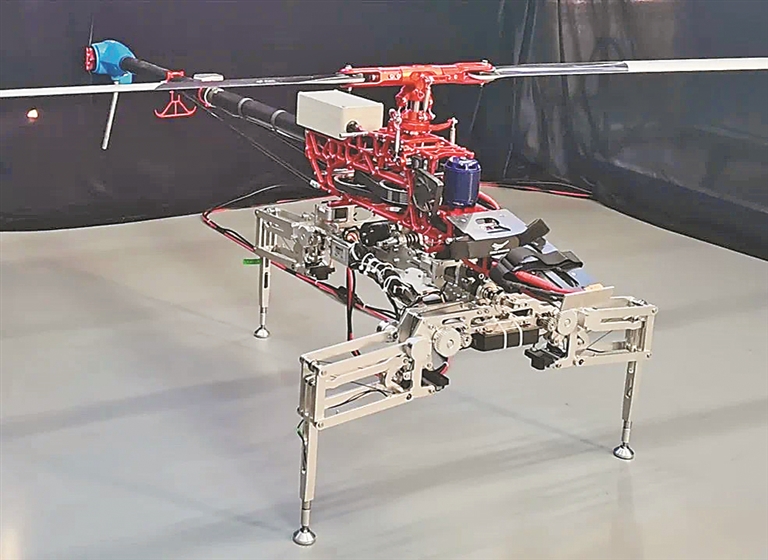
参赛作品 无人直升机腿式起落架
生活报讯 (记者吕晓艳) 记者从哈尔滨工业大学获悉,近日,第五届中国研究生机器人创新设计大赛在长沙举行。哈工大共有18支队伍进入决赛,数量位列全国高校第一;参赛项目荣获一等奖6项、二等奖8项、三等奖4项,一、二等奖获奖数量均位列全国高校第一。一起来看一等奖都有啥!
小行星弱引力场下 机器人仿猫跳跃-着陆控制
作品以小行星探测为研究背景,针对小行星非规则弱引力场这一特殊环境提出了基于强化学习的四足机器人仿猫跳跃-着陆控制。本研究可以控制四足机器人在小行星引力场下完成精确起跳、空中调姿以及软着陆。设计开发了一种基于气悬浮技术的非规则引力场地面等效试验系统,并对以上控制方法进行了半实物仿真验证。
无人直升机腿式起落架机构创成与控制技术
作品以无人直升机为研究对象,针对传统滑橇和轮式起落架着陆地形受限问题,创新性提出绳索拮抗的腿式起落架构型方案,并提出基于地形适应性,稳定性和连杆内力的优化框架、基于足力分配的自主着陆控制策略和起升阶段抑制方法,为无人直升机自主着陆与长时间驻留提供有效保证。
面向交互的集成机器人手
通过多指机械手对目标进行精细操纵或抓取成为良好的解决方案。现有的灵巧手的设计特征仅注重实现拟人的运动而忽略了动态因素(例如交互过程中的物理冲击)。因此,迫切需要研制一种具有高鲁棒性、能够在交互过程中保证自身安全的灵巧手。HIT-DLR团队根据被动柔顺原理,提出了一种对抗式可变刚度柔性关节手指结构,实现机器人灵巧手应对物理冲击的鲁棒性。
刚柔复合振动直驱微小型两栖机器人
该项目针对微小型两栖机器人难以同时实现驱动机构简化、整体尺寸小型化及驱控集成化的难题,采用“驱动-传动-执行”一体化方案设计了刚柔复合振动直驱模块,分别提出了基于柔性薄板的振动致流运动原理和基于弹性足的振动摩擦运动原理,实现了两栖机器人微小型化及无线束自行跨域运动。
HIT极地机器人
“双碳”目标的提出使极地本底探测需求凸显,现有的极地机器人在机动性与清洁能源利用率上无法满足极地冰穹A全年科考的需求。团队针对极地雪况与下降风等特有环境,提出了一种融合收展风帆和雪橇滑行的极地机器人创新理念,完成了高能效移动机器人系统研制,开展了雪面与风场环境试验验证。
仿生多模态软体六足机器人
月球和火星存在大量的熔岩管洞穴,其内部环境可免受星球表面的极端温差和高能粒子辐射,是未来进行地外科学探测、建设人类基地以及资源开发利用的理想目标。针对熔岩管洞穴内部的复杂崎岖地形,团队设计的仿生多模态软体六足机器人具备步行,蠕动和滚动三种基本运动模式,通过内封闭腔室的膨胀变形可以实现机体的卷曲或转向。

